Power HD PHD-WT162 Crawler Servo
The cases of WT162 is made of pure brass material and can be used directly as balance weight servos.
When WT162 is used in a simulated crawler chassis designed with a servo on the beam, the weight on the beam can be heavier and the posture of the whole car can be better.
When WT162 is used in a competition performance crawler chassis designed with a servo on the bridge, the weight on the bridge can be higher and the crawling performance can be better.
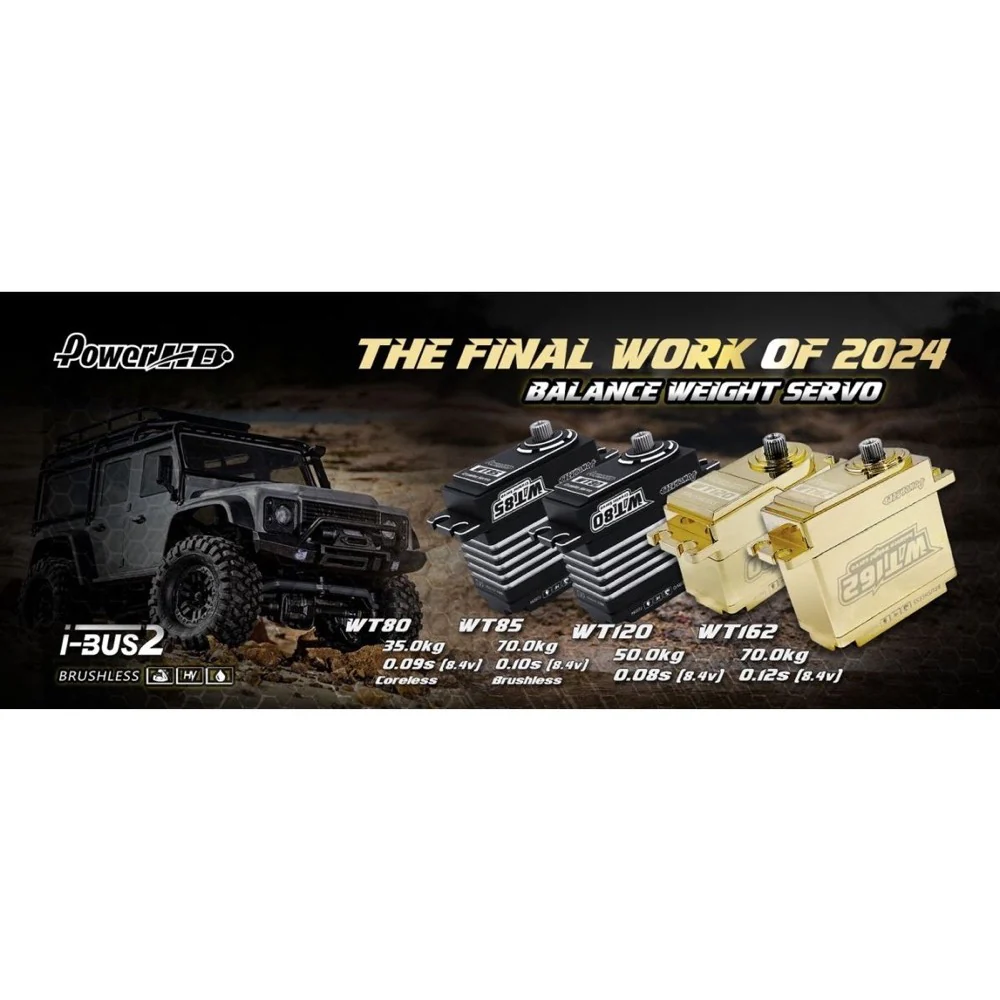
WT162 uses brushless motors and support the FlySky i-BUS2 protocol. The servo status can be directly observed on the FlySky NB4 series radio in real time, and the servo parameters can be programmed on the radio.
WT series servos are all made of steel gears, IP67 waterproof, durable, and can be used in various environments; they perform well on 1/10 and 1/8 simulation crawlers and competition crawlers.
Specifications
- Torque(6.0V): 55.0 kg-cm / (763.8 oz/in)
- Torque(7.4V): 60.0 kg-cm / (833.2 oz/in)
- Torque(8.4V): 70.0 kg-cm / (972.1 oz/in)
- Speed: 0.15 sec (6.0V) / 0.12 sec (7.4V) / 0.10 sec (8.4V)
- Operating Voltage 6.0 ~ 8.4 DC Volts
- Weight: 162 g (5.71 oz)
- Bearing Type Ball Bearing x 2
- Motor Type Brushless Motor
- Gear Type: Steel
- Size 40.7 x 20.5 x 38.7 mm ( 1.60 x 0.81 x 1.52 in)
Original: $149.72
-65%$149.72
$52.40More Images

Power HD PHD-WT162 Crawler Servo
The cases of WT162 is made of pure brass material and can be used directly as balance weight servos.
When WT162 is used in a simulated crawler chassis designed with a servo on the beam, the weight on the beam can be heavier and the posture of the whole car can be better.
When WT162 is used in a competition performance crawler chassis designed with a servo on the bridge, the weight on the bridge can be higher and the crawling performance can be better.
WT162 uses brushless motors and support the FlySky i-BUS2 protocol. The servo status can be directly observed on the FlySky NB4 series radio in real time, and the servo parameters can be programmed on the radio.
WT series servos are all made of steel gears, IP67 waterproof, durable, and can be used in various environments; they perform well on 1/10 and 1/8 simulation crawlers and competition crawlers.
Specifications
- Torque(6.0V): 55.0 kg-cm / (763.8 oz/in)
- Torque(7.4V): 60.0 kg-cm / (833.2 oz/in)
- Torque(8.4V): 70.0 kg-cm / (972.1 oz/in)
- Speed: 0.15 sec (6.0V) / 0.12 sec (7.4V) / 0.10 sec (8.4V)
- Operating Voltage 6.0 ~ 8.4 DC Volts
- Weight: 162 g (5.71 oz)
- Bearing Type Ball Bearing x 2
- Motor Type Brushless Motor
- Gear Type: Steel
- Size 40.7 x 20.5 x 38.7 mm ( 1.60 x 0.81 x 1.52 in)
Product Information
Product Information
Shipping & Returns
Shipping & Returns
Description
The cases of WT162 is made of pure brass material and can be used directly as balance weight servos.
When WT162 is used in a simulated crawler chassis designed with a servo on the beam, the weight on the beam can be heavier and the posture of the whole car can be better.
When WT162 is used in a competition performance crawler chassis designed with a servo on the bridge, the weight on the bridge can be higher and the crawling performance can be better.
WT162 uses brushless motors and support the FlySky i-BUS2 protocol. The servo status can be directly observed on the FlySky NB4 series radio in real time, and the servo parameters can be programmed on the radio.
WT series servos are all made of steel gears, IP67 waterproof, durable, and can be used in various environments; they perform well on 1/10 and 1/8 simulation crawlers and competition crawlers.
Specifications
- Torque(6.0V): 55.0 kg-cm / (763.8 oz/in)
- Torque(7.4V): 60.0 kg-cm / (833.2 oz/in)
- Torque(8.4V): 70.0 kg-cm / (972.1 oz/in)
- Speed: 0.15 sec (6.0V) / 0.12 sec (7.4V) / 0.10 sec (8.4V)
- Operating Voltage 6.0 ~ 8.4 DC Volts
- Weight: 162 g (5.71 oz)
- Bearing Type Ball Bearing x 2
- Motor Type Brushless Motor
- Gear Type: Steel
- Size 40.7 x 20.5 x 38.7 mm ( 1.60 x 0.81 x 1.52 in)